

Conception assistée par ordinateur

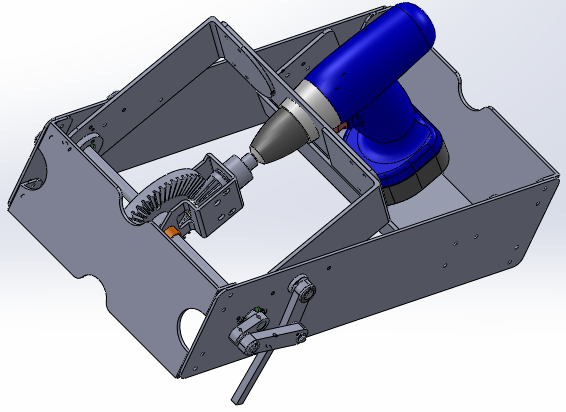
Après les modifications apportées à la première conception avec 4 pattes, notre robot va se déplacer avec 2 pattes en trainant à son arrière un char. La perceuse fournit une puissance nécessaire pour transmettre un mouvement de rotation à l’arbre. L’arbre pivote autour du bâti et par l’intermédiaire des bielles le mouvement de rotation de l’arbre se transforme en mouvement de translation, permettant ainsi au robot de se déplacer linéairement.
A venir : un cerveau moteur intégré au robot va permettre de lever un côté du robot pour lui faire tourner dans un sens ou dans l’autre.


